
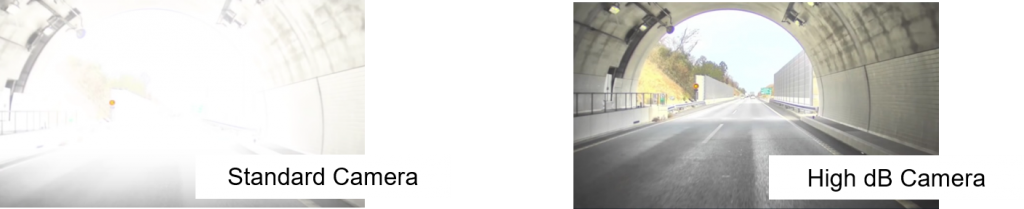
New sensors can capture light intensity variations up to six or more orders of magnitude within the same image frame (+120db HDR, 20*LOG(1e6)), and together with the growing number of applications using computer vision, they are putting very demanding requirements on lens performance. Designing and manufacturing a High Dynamic Range (HDR) lens is probably as much art as science and engineering.
- Sunex HDR Optimized™ lenses are the first stepping stone to building a system that performs reliably in daylight, nighttime, or low-light scenarios.
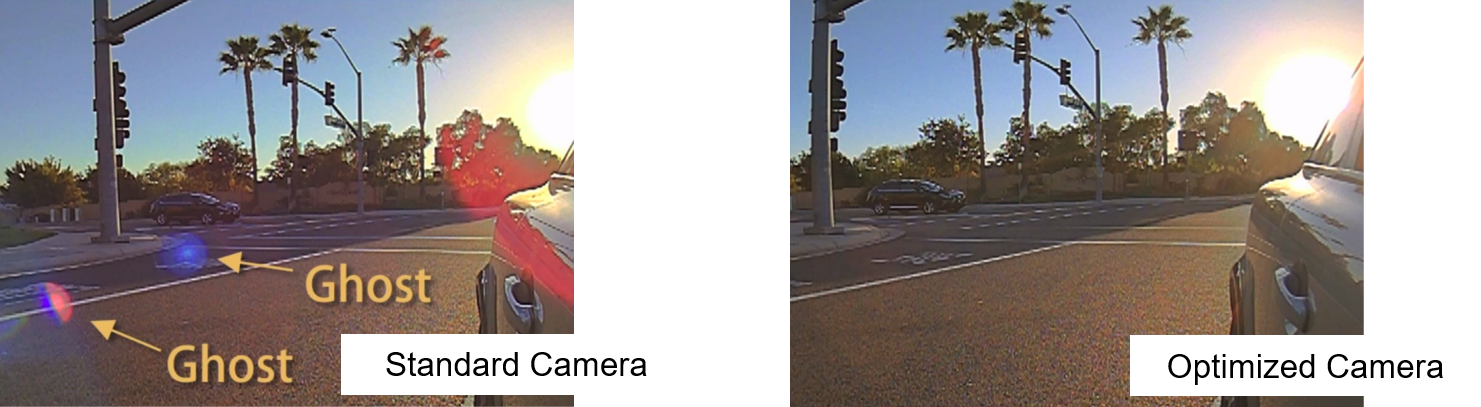
- Sunex NoGhost™ technologies eliminate or minimize optical noise and support SW algorithms in classifying objects reliably and consequently performing the right actions.
To align around a common set of terminology, we should first define the key terms of this article.
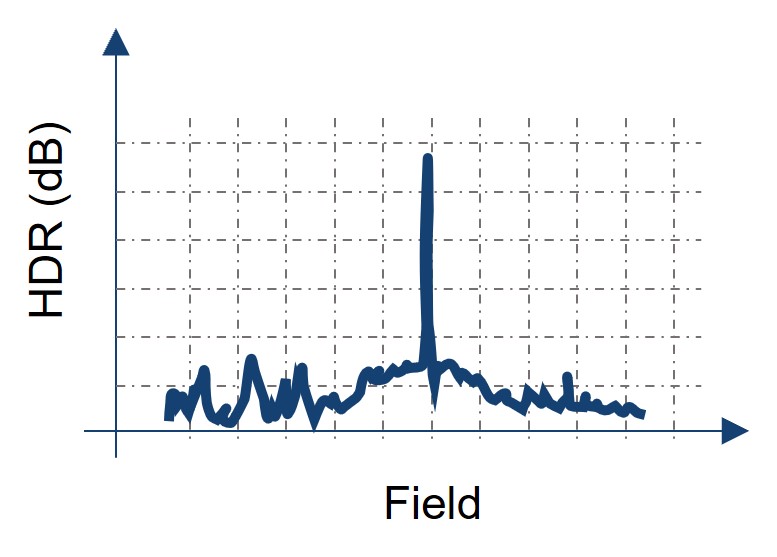
HDR (High Dynamic Range, also WDR) – Dynamic range quantifies the ability of a system to adequately image both high lights and dark shadows in a scene. It is defined as the ratio of the largest non-saturating input signal to the smallest detectable input signal.
Stray Light – Stray light is light in an optical system from a known or unknown source, which follows a path other than intended creating unwanted noise. This light will often set a working limit on the dynamic range of the system.
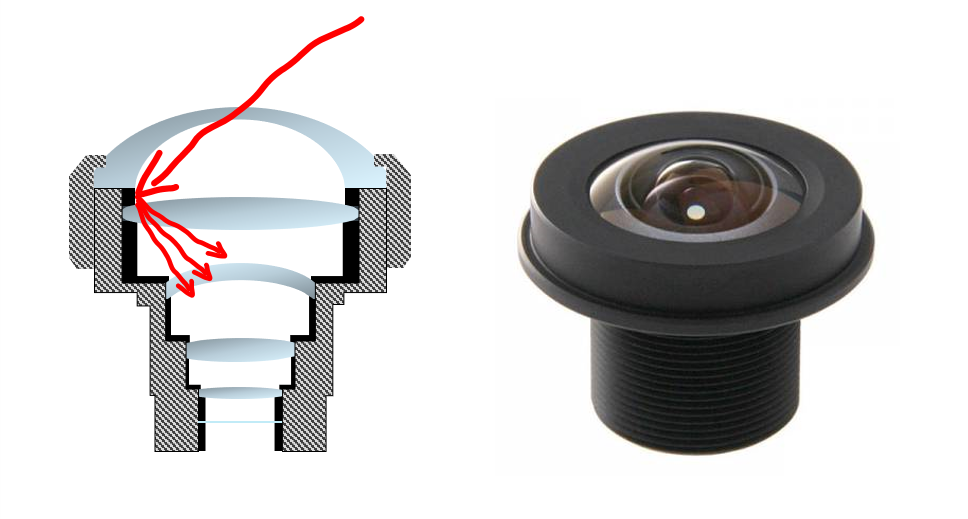
For a lens with n elements, the total number of images that sum up on the sensor is given by N = (2n)^2 – n The image formed on the sensor is therefore the sum of the expected image and many parasitic images. Each of them is modified, scaled, shifted, and attenuated version of the expected image. The formula does not include the effects of barrel, reflection of sensor, etc.
- Example 8G: 1 relevant image, 247 parasitic images
- Example 9G: 1 relevant image, 314 parasitic images
Optimizing just one (1) image path while suppressing hundreds or even thousands of others is not trivial and requires deep design and manufacturing process experience. Should the application require a consistent performance over a wider wavelength range, as it does for a dual-band (e.g., VIS + 940nm) application, or even across the entire VIS to NIR band in hyperspectral applications, fundamental design decision can have an increased impact.
It is not difficult to imagine, that the optomechanical design has a large impact on the overall HDR performance as well. Rays get reflected and scattered on pretty much any surface, and the design team has to consider every surface and every edge of every item! The obvious goal is to reduce, or at least minimize, as much as possible, all reflections within the boundaries of a project’s cost, timeline considerations, and manufacturability!
Choosing the right optical and optomech materials, considering optimized coating performance, having the simulation tools to help guide early decisions, and designing with the manufacturing process in mind are all mandatory from the very start when taking on HDR lens design.
Customer feedback, in the form of design reviews, simulations, and tests on lens and camera levels, is equally important in guiding design decisions and converging a design that can meet the performance, commercial, and project timeline targets.
This is especially true when optimizing for stray light, since other than VGI (Veiling Glare Index) and GSF (Glare Spread Function) that are defined in ISO 9358, stray lights such as ghosts, flares, starbursts, spurious images, etc. are not. Evaluating stray light performance is somewhat subjective to:
- The use case
- The observer
- The algorithm
- The test setup
- The linearity (or non-linearity for that matter) of the sensor
Customer Feedback is key to understand how good stray light performance has to be to serve a specific application.
To learn more about Sunex’ NoGhost™ technology, please view the Knowledge Center article “NOGHOST™ LENSES REDUCING OPTICAL NOISE” or view the following recorded webinar:
Sunex provides lots of options that should be close to any given need. If, however, you cannot find a part that matches your exact requirements, please feel free to contact us: Contact Sunex
At Sunex, we are always interested to learn about new applications and project requirements. If we can’t find something which works in our current portfolio, we may be able to discuss our custom design services!

One Response