The Sunex DXM™ delivers two simultaneous images from different angles on a single CMOS sensor — enabling stereo depth perception in a form factor comparable to a standard single-camera module. This eliminates the need for separate stereo camera baselines, simplifying mechanical integration and reducing system BOM cost.
This article explains how DXM™ works, the optical design principles behind two-FOV imaging on a single sensor, and the robotics, inspection, and automation applications where compact stereo vision creates the most value.
What is the Sunex DXM and how does stereo vision on a single sensor work?
As robotics and automation systems grow increasingly compact, intelligent, and power-efficient, the supporting vision technologies must evolve in parallel. One area undergoing rapid growth and innovation is stereo imaging, where depth perception is derived from capturing two slightly offset views of the same scene.
While traditional stereo systems use two CMOS sensors and two lens assemblies, a more compact alternative has emerged: single-sensor stereo imaging, where two optical channels converge onto a single CMOS sensor.
This architectural shift offers a powerful blend of reduced physical footprint, lower power consumption, improved synchronization, color-matching, and overall cost efficiency.
Originally explored for space-constrained applications, the concept is now gaining momentum across a diverse set of platforms, including Autonomous Mobile Robots (AMRs), Automated Guided Vehicles (AGVs), humanoid robots, manufacturing automation, and even multi-modal vision systems.
This article examines the advantages, trade-offs, and emerging applications of single-sensor stereo imaging systems, particularly in the context of Sunex Inc.’s advancements in optical design, manufacturing, and DXM technology, which enables dual-channel imaging on a single sensor.
How does the DXM system achieve depth sensing with one CMOS sensor?
A single-sensor stereo imaging system consists of two independent optical channels, based either on a relay architecture, which offers a wide baseline, or on a direct imaging architecture using closely positioned lenses that project two images onto different portions of a single image sensor. The architecture chosen depends largely on the use case, and can be implemented using:
- Relay-prism or mirror systems, which allow a longer baseline (distance between the optical channels), enabling better depth perception at mid-to-long ranges.
- Direct-imaging optics, where two small lenses with a shorter baseline directly image adjacent scenes onto the same CMOS sensor.
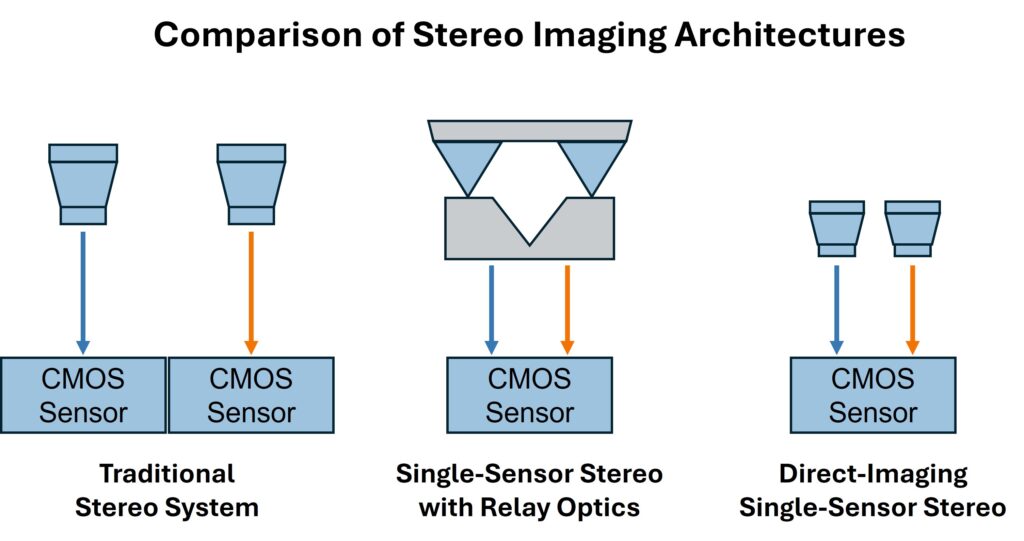
The result in either case is a stereo image pair captured simultaneously, pixel-aligned and temporally consistent, without the need for a second sensor.
What are the advantages of single-sensor stereo vision over traditional dual-camera stereo?
The compactness of single-sensor stereo systems is obviously one compelling feature. Traditional stereo cameras must allocate physical space for two image sensors and their supporting electronics, while also maintaining rigid mechanical alignment and consistent calibration. This is a particular challenge in mobile robotics, where every cubic centimeter counts.
By contrast, a single-sensor design drastically reduces system footprint. The image processing electronics remain the same as a standard monocular camera module, and the optical elements can often be embedded into a compact housing. This opens the door to new designs for low-profile AGVs, slim robotic arms, or humanoid head units, where stereo vision must be integrated without adding bulk or weight.
Sunex, with decades of experience in designing miniaturized optics for automotive, medical, and industrial systems, brings deep expertise in custom optical design and manufacturing, including all-glass and hybrid designs, active optical axis matching, and camera module development for compact imaging systems. These capabilities enable now DXM™ direct imaging solutions with tighter baselines without sacrificing image quality or manufacturability.

Power Efficiency in Battery-Operated Systems
In battery-powered robots, energy is often the most limited resource. A conventional two-sensor stereo setup not only doubles sensor power draw but also adds thermal and processing load for synchronizing and handling dual video streams. With a single-sensor system, all duplicate overhead is eliminated.
Sunex’s design approach includes low-distortion, HDR, and straylight optimization that help customers maximize image throughput without overtaxing the system-on-chip (SoC). Additionally, thermal management improves due to the consolidation of the imaging pipeline into a single, tightly integrated unit.
Perfect Synchronization and Simplified Calibration
Another major advantage of single-sensor stereo imaging is inherent synchronization. Both images are captured on the same sensor die in the same exposure cycle. This eliminates the need for complex software-level synchronization or dual-sensor calibration routines, or even sensor-to-sensor alignment
In dual-sensor setups, even slight mismatches in gain, exposure time, or readout timing can introduce depth errors and visual artifacts. Color matching of different sensors can be particularly difficult. These issues are especially problematic in fast-moving robotic systems or dynamic environments. By contrast, single-sensor systems eliminate this risk by design.
Sunex’s DXM technology takes it a step further by pre-mapping and correcting the sensor’s imaging zones, ensuring linear and geometrically stable image capture across both optical channels. This not only improves stereo accuracy but also significantly enhances long-term field reliability, which is critical for automotive, industrial, and commercial deployments.

Cost Efficiency: Fewer Components, Lower BOM
Reducing component count directly translates to lower costs, not just in materials, but also in assembly, calibration, and quality control. A single-sensor stereo system uses:
- One sensor (instead of two)
- A shared image processing pipeline
- Fewer connectors, cables, and serializers
- Simplified housing and optical alignment
For product designers working under tight bill-of-materials (BOM) constraints, this is an attractive value proposition. When paired with Sunex’s ability to deliver high-performance custom lenses and precision-molded optical components (glass or plastic) at scale, the result is a hybrid stereo vision module that is not only cost-effective but also production-ready.
Performance Trade-Offs and Technical Limitations
While compelling, single-sensor stereo systems are not without trade-offs.
Baseline Constraints
In direct imaging configurations, the baseline is inherently limited by the physical size of the optics and sensor. This constrains the depth resolution and range, making such systems better suited for near-field applications (e.g., 0.2 – 2 meters). Relay optics can increase baseline distance, but at the cost of added optical complexity and potential alignment drift if not properly designed. Still, for systems with short object distances, or where depth measurement is not the primary goal (see below), this direct imaging approach is very attractive.
Reduced Per-View Resolution
Because the sensor area is split between two optical channels, each stereo view occupies only half (or less) of the total pixel array. For example, a 1920×1080 sensor would provide only 960×1080 resolution per channel in a side-by-side stereo layout. While sufficient for many tasks like obstacle detection or object segmentation, this may be inadequate for high-precision metrology or long-distance depth mapping. Luckily, we live in an era where there is a vast selection of different sensor options. Increasing resolution on each channel may be as simple as changing sensors. For example, 2 4K sensors can be replaced with a single 20mp sensor, and you will still get 2 4K channels (image circles) on one sensor with the corresponding cost and overhead savings. Since the DXM is highly configurable, the solution can be tailored to each use case.
Sunex’s design experience can help compensate for these limitations through enhanced field correction and distortion balancing across the image zones. In some applications, custom sensor formats or aspect ratios can also be employed to optimize the stereo layout. In short, the configurability of the DXM system allows you to put the pixels (IE Region of Interest) where you really need it.
Which robotics and automation applications benefit most from DXM stereo vision?
AGVs and AMRs
Warehouse robots and last-mile delivery bots require compact, cost-effective depth perception for obstacle avoidance and autonomous navigation. Since the operating environment is structured and typically well-lit, the reduced baseline and resolution of a single-sensor system are acceptable trade-offs for gains in size, weight, and battery life.
Humanoid and Consumer Robots
For robots that interact with people or operate in tight spaces—such as service robots, assistants, or educational bots—single-sensor stereo vision provides reliable depth awareness for facial tracking, gesture detection, and object manipulation. The compact form factor enables the embedding of vision systems in aesthetically pleasing designs.
Manufacturing Automation
In high-speed production lines, stereo vision is used for bin picking, height profiling, presence detection, and assembly inspection. Single-sensor stereo cameras provide an efficient way to deliver these functions in a durable, factory-ready package. Their simplified calibration and reduced cabling also translate to easier deployment and less downtime.
Sunex’s ability to co-design the lens, optical alignment mechanism, and even the supporting PCB for integration into robotic tooling arms or conveyor systems offers end-to-end value for industrial customers.

What other Use Cases Beyond Stereo Imaging would benefit from the DXM technology?
The same architecture used for stereo vision can also be adapted for multi-modal or dual-purpose imaging by varying the optical paths or filters on each channel. This unlocks several compelling new applications:
Dual Field of View (FOV) Imaging
One optical channel can be designed for wide-angle situational awareness (e.g., 120° FOV), while the other is optimized for narrow-angle detail (e.g., 30° FOV). Both views are captured simultaneously, providing a context + detail pipeline in one camera.
This is particularly useful in:
- Security robots: Wide FOV for surveillance, narrow FOV for facial identification
- Agricultural drones: Overview of crop rows + detailed view of plant health
- Logistics: Box detection + barcode reading
Simultaneous Visible and Infrared (RGB/IR) Imaging
Another configuration utilizes one lens and an optical filter stack optimized for RGB, while the other is tuned for near-IR or thermal infrared. This enables applications that require day/night (RGBIR) vision, material identification, or contaminant detection.
Examples include:
- Medical robotics: Visual navigation + vein mapping
- Food processing: Surface color + sub-surface bruising or spoilage
- Smart agriculture: Visible plant monitoring + chlorophyll/NIR reflection analysis
Sunex’s design team is uniquely positioned to deliver these systems using custom multi-channel optics, efficient single and dual-bandpass coatings, and proprietary dual optical channel alignment, along with optomechanical tolerancing for series production to ensure alignment and performance across modalities.
Extended Exposure HDR
Imagine using two otherwise identical lenses, but one is optimized for a low F/#, while the other is optimized for high F/#. This could not only give the ability to capture a wider dynamic range in the same exposure time, but it would simultaneously allow more deterministic control over depth of field.
Examples Include:
- Robotic and Machine Vision
- Security
- Autonomy
Stereo Content Capture
There are uses for stereovision beyond machine depth measurement. A dual-channel on a single sensor would enable stereo content capture without the need to calibrate two different sensors. The human eye is very sensitive to differences in color and relative illumination when presented with two images side-by-side. The DXM effectively eliminates such discrepancies.
Examples Include:
- AR/VR
- Content capture and display (Broadcast/Cinema)
- Videoconferencing
Guidelines for System Designers
Design Objective | Preferred Approach |
Compact form factor | Single-sensor (DXM™) |
Low power consumption | Single-sensor (DXM™) |
Simplified calibration & synchronization | Single-sensor (DXM™) |
Depth perception at long range | Dual-sensor |
High per-channel resolution | Dual-sensor |
Dual modality (RGB+IR or wide+narrow FOV) | Single-sensor (DXM™) |
Cost-sensitive volume deployment | Single-sensor (DXM™) |
Conclusions
As robotic and machine vision applications demand smaller, smarter, and more integrated systems, single-sensor stereo imaging emerges as a viable and even preferable alternative to traditional dual-sensor architectures. Thanks to improvements in optics, sensor design, and calibration algorithms, these systems are no longer niche solutions; they are becoming a key differentiator.
Sunex continues to lead in this space by offering optical design services, custom lens manufacturing, and advanced alignment and integration solutions tailored to the needs of robotics OEMs, module makers, and system integrators. Whether enabling stereo imaging, dual-FOV pipelines, or RGBIR fusion, Sunex’s DXM™ technology provides the optical precision and design flexibility needed to deliver next-generation vision systems.
As the boundary between form factor and functionality continues to shrink, vision systems like these will be key to enabling the next wave of intelligent automation.
Download PDF brochure

Single-Sensor Stereo Vision